Nicholas Leonard1, and Andrés G. Vidal-Gadea2§
1Normal University High School, Normal, Illinois
2School of Biological Sciences, Illinois State University, Normal, Illinois
§Correspondence to: Andrés G. Vidal-Gadea (avidal@ilstu.edu)
Abstract
Description
Methods
Reagents
Extended Data
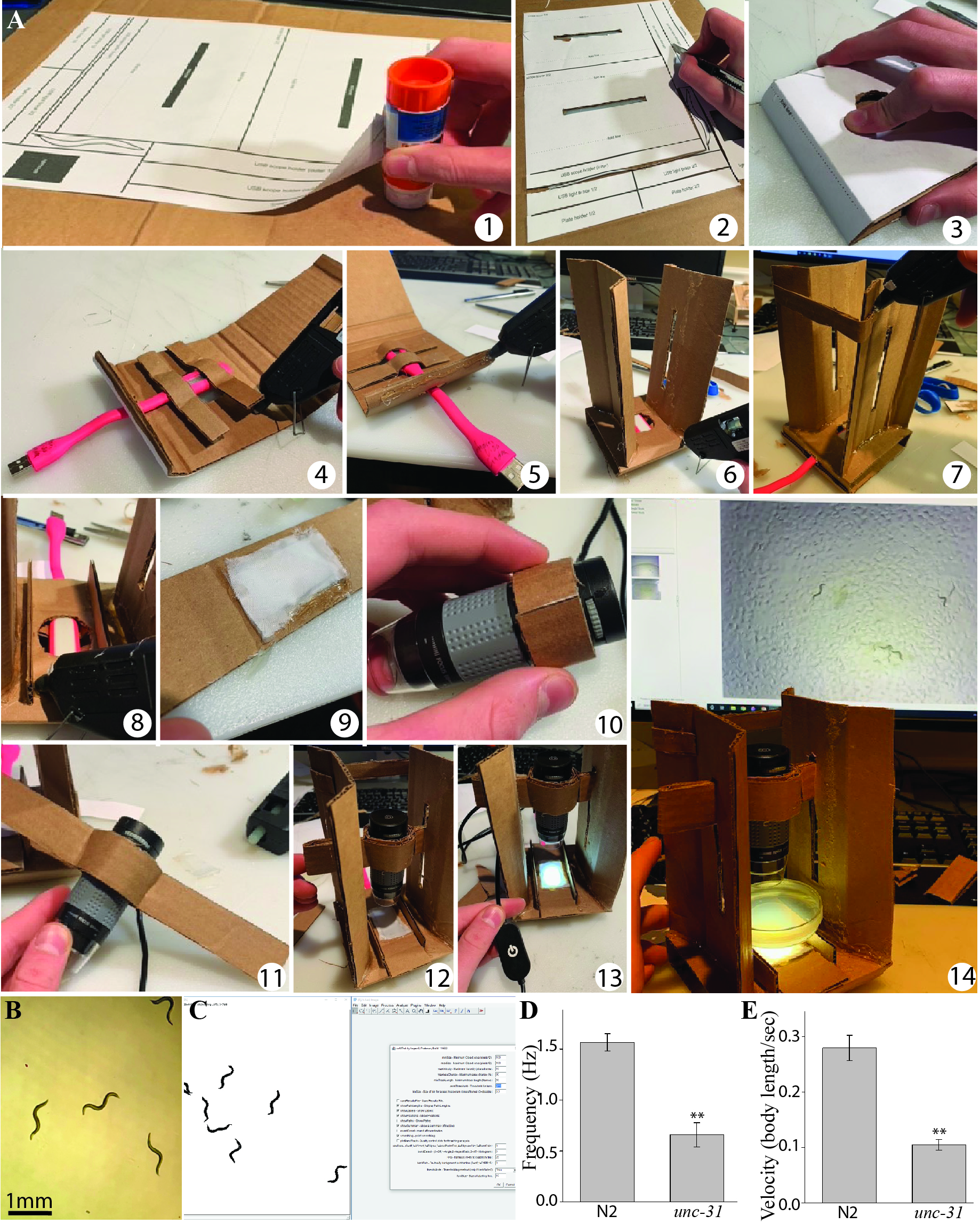
- Description: Stencil for the construction of the affordable worm tracker. The stencil should be printed in an 8x11in standard page and used as a guide in the construction of the tracker. Refer to the text for instructions. . Resource Type: Image. DOI: 10.22002/D1.1908
- Description: Sample movie of eight unc-31(e928) mutants swimming in liquid nematode growth media like the ones used to illustrate the functionality of the tracking system. Movies were saved as avi and later imported and processed in ImageJ. The different steps of pre-processing are illustrated as is the result of the tracking analysis. Resource Type: Audiovisual. DOI: 10.22002/D1.1909
Acknowledgements
Funding
Author Contributions
- Nicholas Leonard: Data curation, Investigation, Methodology
- Andrés G. Vidal-Gadea: Conceptualization, Methodology, Funding acquisition
Reviewed By
Wan-Rong Wong, Jared Young
Database Reference ID: WBPaper00061179
History
- Received: 12/7/2020
- Revision Received: 3/9/2021
- Accepted: 3/16/2021
- Published: 3/17/2021
Copyright
© 2021 by the authors. This is an open-access article distributed under the terms of the Creative Commons Attribution 4.0 International (CC BY 4.0) License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Citation
PubMed Central: PMC7970311
PubMed: 33768198
microPublication Biology is published by
1200 E. California Blvd. MC 1-43 Pasadena, CA 91125
The microPublication project is supported by

The National Institute of Health -- Grant #: 1U01LM012672-01